Back from Cleveland - Photos from Cleveland
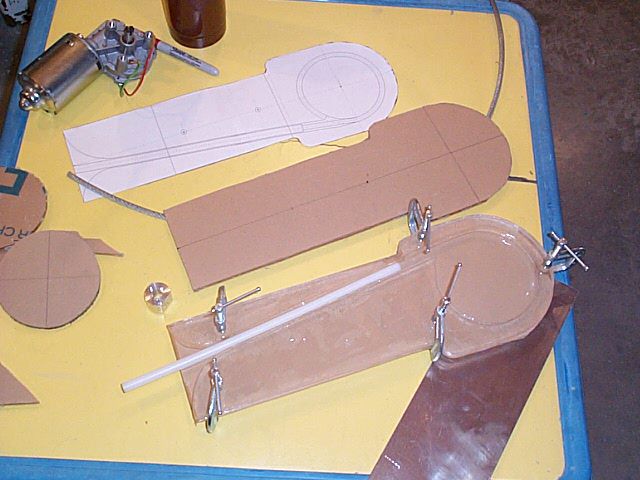
Here's some shots of the arm mechanism being built.
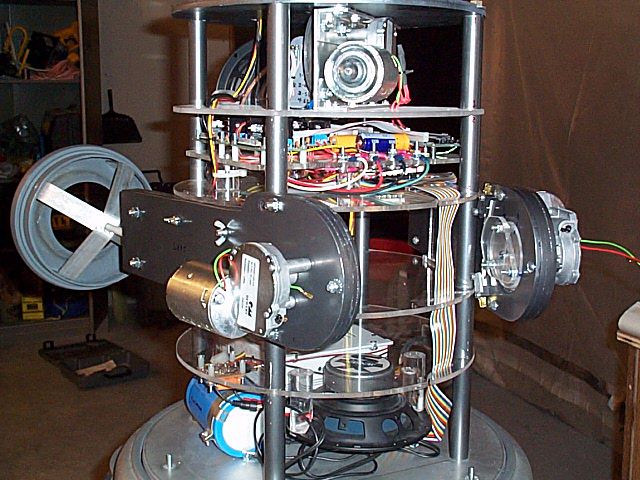
Inside view of the torso wiring.
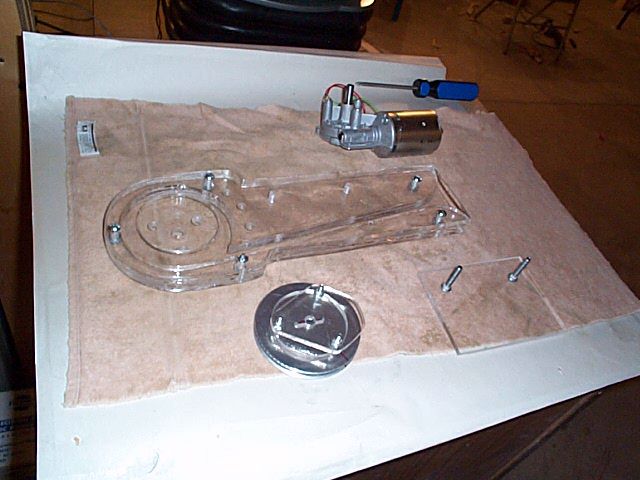
The
arm mech patterns laid out on 1/4" acrylic.
The
arm mech parts.
Another
shot.
Painted,
note the limit switches that are activated by the cam.
Another
shot.
Arms
attached to the CSS.
Testing
the arms from the laptop.
As these shots show, the arms are actuated by a pully, attached is a 12" long cable that pushes or pulls a 3/8" delrin plastic rod out or in to the acrylic frame. The limit switches ensure that the pully never turns too far in either direction.
I'm done with
my robot for now, maybe next winter I'll upgrade the software and add some
new stuff, but it's time to enjoy the summer now! A full size Space
Pod would be a nice outside project...
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}