Merry Christmas!
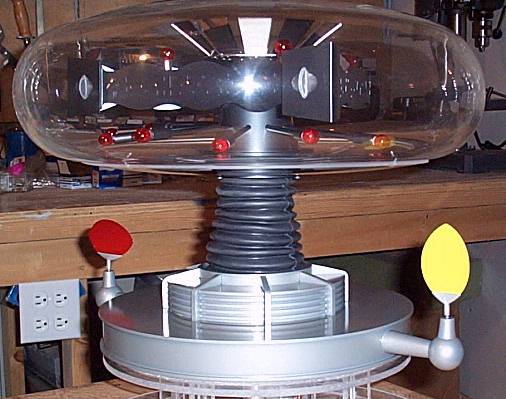
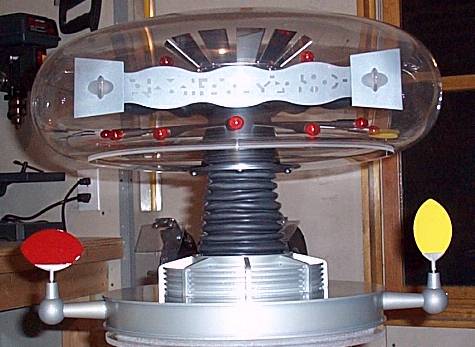
Finished the radar
rotation motor and sensor. Attached the motorized ears. Painted
the ears and the radar section.
I'm using two
small "micro motors" at 2.5 volts to run the ears.
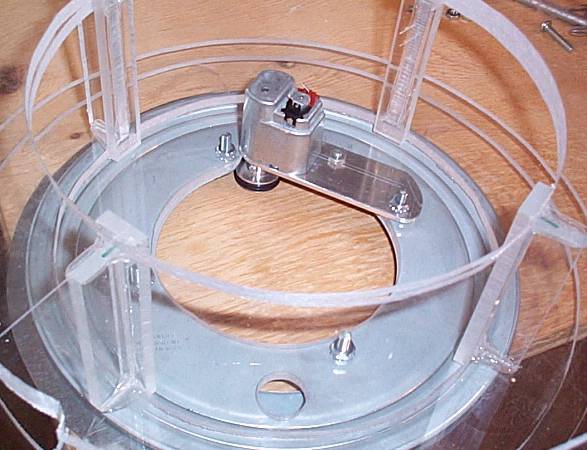
The radar is
turned by a small motor which engages the lazy susan with two 5/8" O-rings
on a small hub.
Also attached
to the lazy susan is a sheet metal plate cut with a half circle extension.
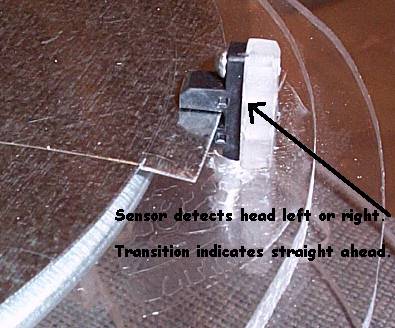
This extension passes through an IR emitter detector sensor which will
give the computer some feed back. It will allow the computer to know
if the head is pointing left or right. The computer can use this
info to point the head forward also, it will just drive the motor in the
correct direction, stopping once the sensor indicates a transition from
one side to the next.
Here's some photos:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}