Got the basic frame for the leg support done and the knees are also done except for finish work. Here's a brief description of how my robot's lower half goes together. In each tread section I've got a plywood plate that bolts onto two pieces of angle iron. Each piece of angle iron is attached to the upper two wheel axles using the axle bolts. Attached to each plywood plate are two vertical pipes for a total of four pipes extending up out of the tread sections. The leg support frame has four larger pipes extending down, two for each "leg". My rubber legs are attached to the knees. The support is lowered onto the rubber legs through the top, the four pipes extending through four holes (2 in each knee) in the fiberglass knees. The rubber legs are pulled up and onto the support like putting on a pair of pants. The entire thing (rubber legs with knees and the support frame) is then picked up and the four larger pipes slide down onto the four smaller pipes coming out of the tread section, it is quite sturdy.
Picture
of the assembled frame (the tread section mounts are sitting on the floor,
not in the tread section).
Picture
of the frame in the "lean forward" position.
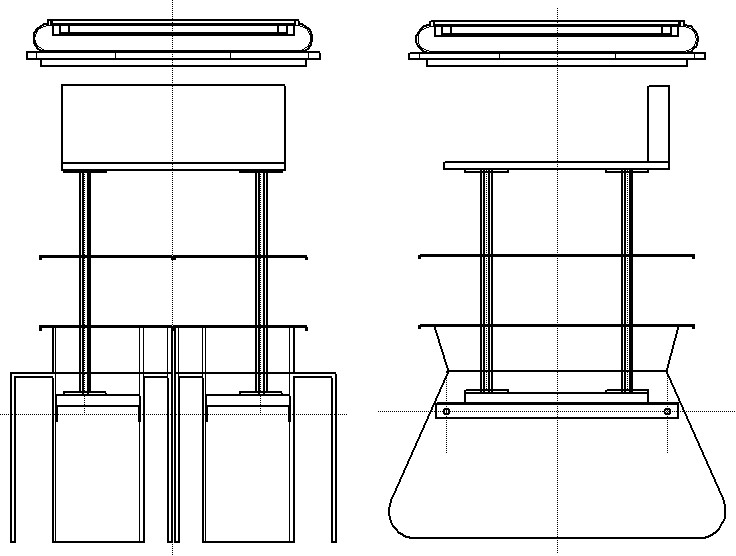
Blueprint
of the frame support.
{kind=link}
{kind=link}
{kind=link}