
I've been hard at work, but not much that shows.
I'm
using a small voltage regulator in the radar section to rotate the sensor
ears at the correct speed.
Bottom
view of the completed collar.
Shot
of the robot undergoing full upper weight testing of the lean forward mechanics.
Another
shot of in the lean forward position.
Up
close of the modified limit switch actuators on the lean forward drive
motor.
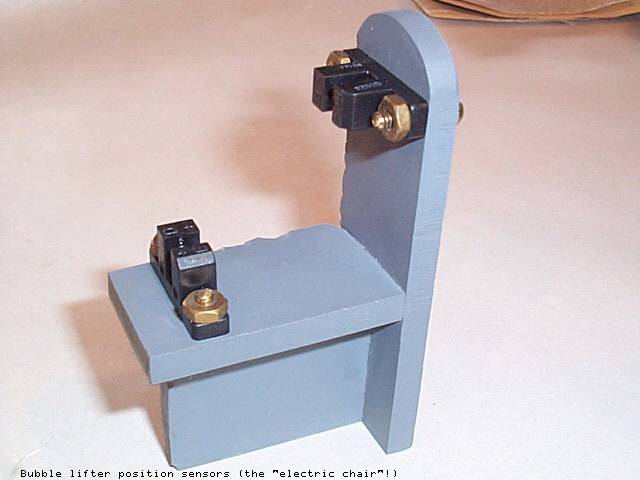
Bracket
and sensors for the bubble lift mechanism.
Bracket
mounted in place.
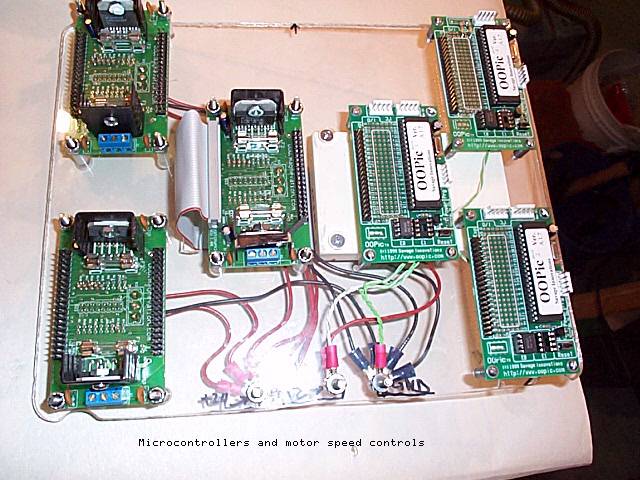
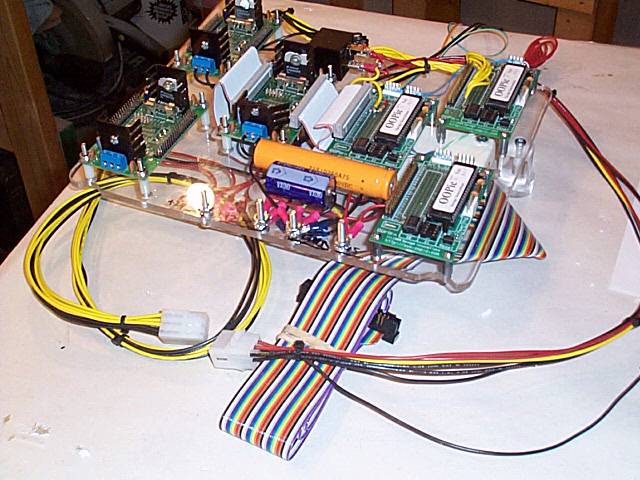
Top
view of the microcontrollers and motor speed controls, not finished.
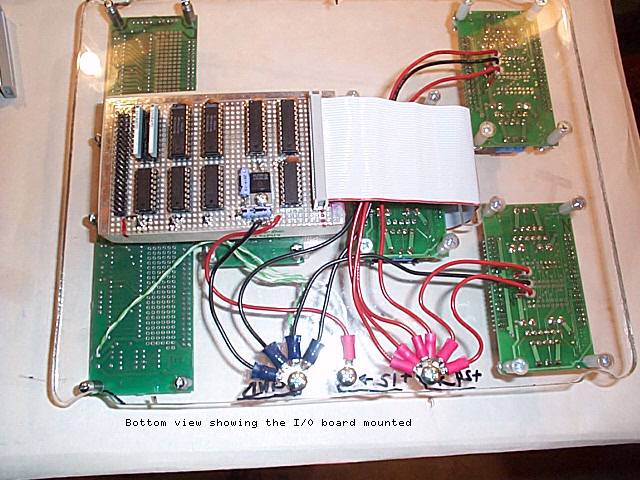
Bottom
view showing the mounting of the main I/O board.
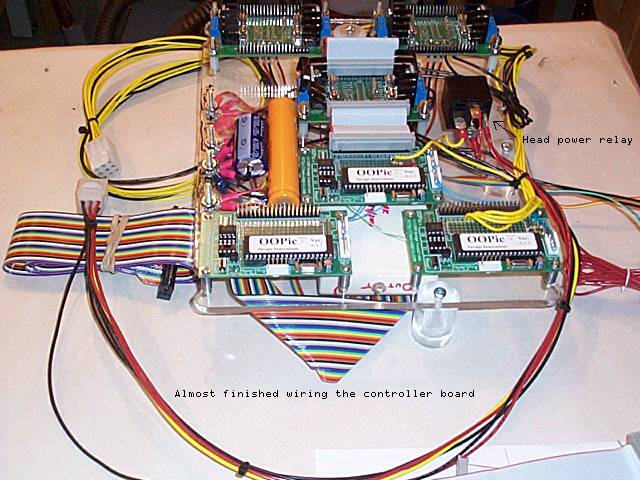
Controller
board after wiring is added.
Another
shot of the board.
The
Central Support Structure(CSS) with the components in place and wired up.
Most of the wiring
is now done, I just need to finish up the bundle that connects the torso
to the CSS. Then I'll need to spend some time programming the controllers
for basic position functions and write some software for the Laptop to
direct the motions. I hope to have some limited animation done in
time for FV. But the arms will most likely have to wait until later.
I will, of course, paint and finish them, but they won't be functional.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}